
아두이노 라인 트레이서 만들기 - 로봇 조립하기
안녕하세요! 이번에는 새로운 장기 프로젝트를 시작해 보려고 합니다. 바로 ‘줄 따라가는 로봇 만들기’인데요, 바닥에 그어진 줄을 감지하여 따라갈 수 있는 로봇을 여러가지 방식으로 만들어보고자 합니다. 이번 포스트는 그 첫 번째 시간으로 이후 다른 여러가지 로봇을 만드는데 뼈대가 되는 기본형 로봇을 만들 것 입니다.
차체 구성
이전 ‘장애물 피하기 로봇 만들기’ 프로젝트에서 사용했던 차체 프레임을 사용하였습니다. 다만, 초음파 센서 등 이번 프로젝트에 필요없는 부품들을 제거하였고 TCRT5000을 추가하였습니다. 또한, 이전 프로젝트에서 알았냈던 인코더의 결함을 해결하기 위해 모터를 마이크로 기어드 DC 모터로 교체하였습니다.
TCRT5000 또는 마이크로 기어드 DC 모터에 대한 더 자세한 정보는 다음 링크를 참고해주시기 바랍니다.
| 부품 | 포스트 |
| TCRT5000 | 아두이노 라인 트레이서 TCRT5000 사용하기 |
| 마이크로 기어드 DC 모터 | 아두이노 직각 위상 인코더(quadrature encoder) 모터 사용하기 |
차체 조립
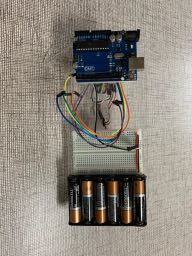
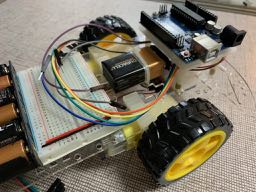
사진에서 볼 수 있듯, 기본 차체 뼈대에 아두이노, 브레드 보드, 16V 건전지, L298N 모터 드라이버, 볼캐스터 등을 붙인 상태에서 조립을 시작하였습니다.
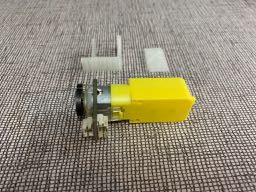
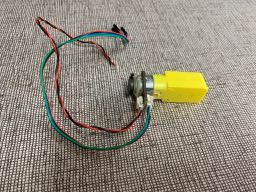
마이크로 기어드 DC 모터
인코더의 결함을 해결하기 위해 기존 DC 모터를 기어드 모터로 교체하였습니다. 3D 프린팅을 사용하여 모터 지지대를 인쇄하였으며, 모터에 전선을 연결한 이후 지지대에 나사로 고정하였습니다.


9V 건전지
이전의 프로젝트들과 달리 이번 프로젝트에서는 아두이노 전원 공급용 9V 건전지를 차체 위에 설치하였습니다. 이는 DC 모터에 비해 기어드 모터가 차지하는 부피가 커서 공간이 부족해졌기 때문입니다.
TCRT5000
이번 ‘줄 따라가기 로봇’ 프로젝트에서 가장 중요한 역할을 하는 줄 감지 센서입니다. 모터와 마찬가지로 3D 프린팅을 사용하여 지지대를 인쇄하였으며, 감지를 하는데 최적거리가 2.5mm 임을 고려하여 센서의 끝이 바닥에서 2.4mm 떨어지도록 설계하였습니다. 지지대에 센서를 부착한 이후 나사를 이용하여 차체에 붙였습니다.


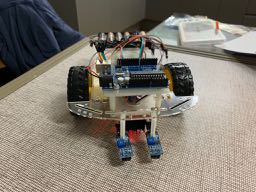
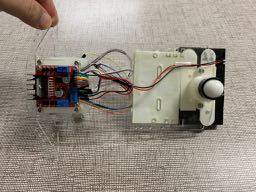
완성된 차체

이로써 ‘줄 따라가기 로봇’ 프로젝트의 차체 조립을 마쳤습니다. 다음에는 전선 배치 및 실험 진행 후 결과에 대한 포스트를 하도록 하겠습니다.